Design: Sample ROS Node(VLM Planner)
このページの想定読者
- sample nodeが使用する入出力形式を知って、自分自身でML plannerのnodeを作成したい方
- sample nodeの入力画像データはどういうものか、出力する軌道データはどういうものか知って勉強したい方
このページでは、Sampleとして提供しているVLM Plannerの構成について解説します。これを参考に、自分自身で作成したplannerをautowareに結合してみてください。
Input/Output概略
- 基本構成としては、画像を入力し、trajectoryを出力するという設計になっています。
- 画像の他にも、以下のような情報を含むtopicを入力として受け取っています。
- kinematic_state, acceleration: 車両の現在状態の情報
- 出力するtrajectoryはwaypointの形式で表現されています。
- VLM Plannerでは、
base_Link座標系で表現されたtrajectoryを出力します。
graph LR
SampleNode["Sample<br>ROS node"]
Sensing -- "/sensing/camera/image_raw" --> SampleNode
Localization -- "/localization/kinematic_state<br>/localization/acceleration" --> SampleNode
SampleNode -- "/planning/ml_planner/auto/trajectory" --> ControlInput/Output詳細
Input詳細
入力データのTopic Name,Type,QoSを以下に示します。
| Topic Name | Type | QoS |
|---|---|---|
/sensing/camera/image_raw |
sensor_msgs/msg/Image |
Reliability=BEST_EFFORT, Durability=VOLATILE |
/localization/kinematic_state |
nav_msgs/msg/Odometry |
Reliability=RELIABLE, Durability=VOLATILE |
/localization/acceleration |
geometry_msgs/msg/AccelWithCovarianceStamped |
Reliability=BEST_EFFORT, Durability=VOLATILE |
ROS 2においてNodeを作成する際には、QoSに注意が必要です。たとえTopic NameとTypeが合っていても、QoSが間違っていると正しくpublish/subscribeができない場合があります。
AWSIMより出力される画像の解像度は1920*1080です。modelに入力する際には、適切なサイズへ変換を行ってください。
/localization/kinematic_stateは現在位置や速度の情報を保持しています。それぞれの情報がどの座標系で表現されているのかをframe_idで確認する必要があります。詳細はnav_msgs/msg/Odometryを確認してください。
Output詳細: 軌道データ(waypoints)
出力データであるtrajectoryのTopic Name,Type,QoSを以下に示します。
| Topic Name | Type | QoS |
|---|---|---|
/planning/ml_planner/auto/trajectory |
autoware_auto_planning_msgs/msg/Trajectory |
Reliability=BEST_EFFORT, Durability=VOLATILE |
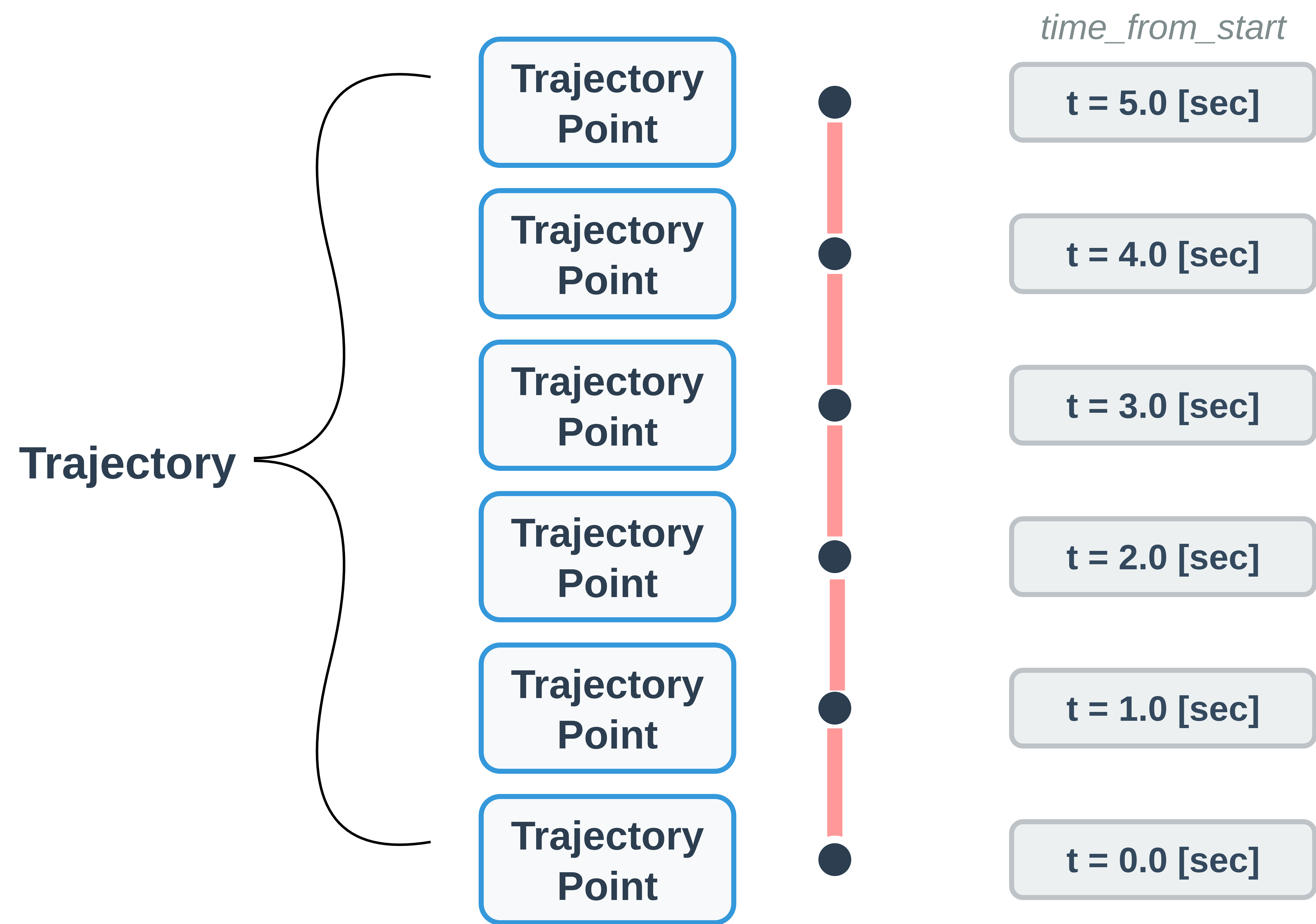
Trajectoryは、点列(waypoints)の形式で表現されています。
各点(autoware_auto_planning_msgs/msg/TrajectoryPoint)には、
- 何秒後に
- どの点に向かうべきか
- その際の速度はいくつであるべきか
というような情報が格納されています。この点を並べたものをTrajectoryとして使用しています。
自作のPlannerを結合するには
- 自作のPlannerのInput/Outputを確認し、このページに載っているInput/Output topicに対応しているかどうか検討してみてください。
- うまく対応している場合は、Input/Output topicから自作PlannerのInput/Outputへの変換を実装することで、ROS Nodeを作成することができます。
- キャリブレーション情報が必要な場合、以下のtopicも使用可能です。
| Topic Name | Type | QoS |
|---|---|---|
/sensing/camera/camera_info |
sensor_msgs/msg/CameraInfo |
Reliability=BEST_EFFORT, Durability=VOLATILE |
/tf_static |
tf2_msgs/msg/TFMessage |
Reliability=RELIABLE, Durability=TRANSIENT_LOCAL |