Simulator
Overview
This page describes the specifications of the simulator used in the AI Challenge.
The simulator is based on the open-source autonomous driving simulator "AWSIM" developed for Autoware.
Commandline Options
| Option | Type | Default | Description |
|---|---|---|---|
| --timeout | float | 420.0 | Set session timeout seconds. |
| --endless | bool | false | Enable/disable session timeout. |
| --pit-stop | bool | true | Enable/disable features related to pit-stop. |
| --replay0 | string | Load driving logs and replay as a different vehicle. |
Use result-details.json for the driving log for replay. Also, replay supports 10 vehicles from --replay0 to --replay9.
Keyboard Operation
| Operation | Key |
|---|---|
| Quit | Esc |
| Reset | Space |
| Switch camera | C |
| Accel | Arrow Up |
| Brake | Arrow Down |
| Steering | Arrow Left, Right |
| Gear (D) | D |
| Gear (R) | R |
| Gear (N) | N |
| Gear (P) | P |
Topic Operation
| Topic | Type | Description |
|---|---|---|
| /aichallenge/awsim/status | std_msgs.msg.Float32MultiArray | Get status of the simulation. |
| /aichallenge/awsim/change_time_scale | std_msgs.msg.Float32 | Set the timescale for the simulation. |
| /aichallenge/awsim/reset | std_msgs.msg.Empty | Reset the simulation. |
The above /aichallenge/awsim/status has the following structure.
| Index | Value |
|---|---|
| 0 | session timeout |
| 1 | lap count |
| 2 | lap time |
| 3 | section |
| 4 | timescale |
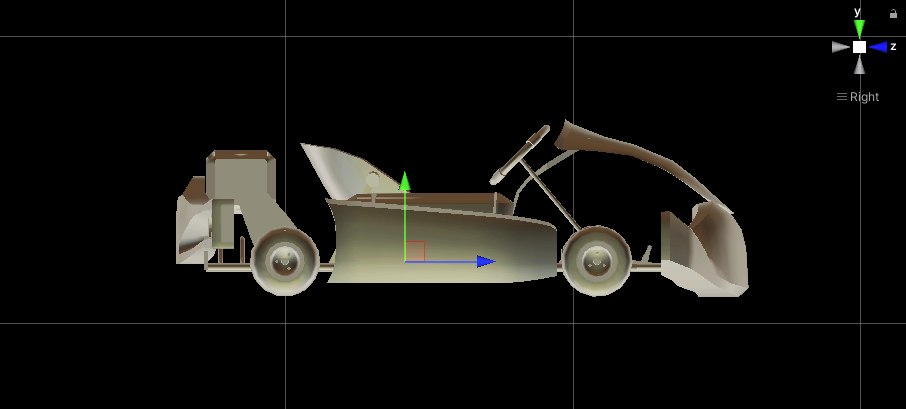
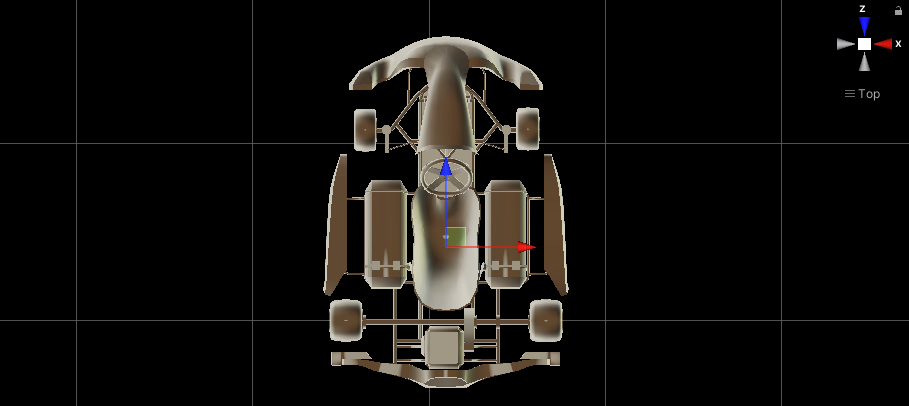
Vehicle (Racing Kart)
The vehicle conforms to the specifications of the EGO Vehicle in AWSIM and is designed with specifications close to an actual racing kart.

Parameters
The following table summarizes the vehicle parameters.
| Item | Value |
|---|---|
| Vehicle Weight | 160 kg |
| Length | 200 cm |
| Width | 145 cm |
| Front Wheel Diameter | 24 cm |
| Front Wheel Width | 13 cm |
| Front Wheel Tread | 93 cm |
| Rear Wheel Diameter | 24 cm |
| Rear Wheel Width | 18 cm |
| Rear Wheel Tread | 112 cm |
| Maximum Steering Angle | 80° |
| Maximum Acceleration | 3.2 m/s^2 |
Vehicle Component
The following table summarizes the settings of the Vehicle component. For detailed information of the setting items, see this manual.
| Item | Value |
|---|---|
| Vehicle Settings | |
| Use Inertia | Off |
| Physics Settings (experimental) | |
| Sleep Velocity Threshold | 0.02 |
| Sleep Time Threshold | 0 |
| Skidding Cancel Rate | 0.236 |
| Input Settings | |
| Max Steer Angle Input | 80 |
| Max Acceleration Input | 3.2 |
Rigidbody Component
The following table summarizes the settings of the Rigidbody component. For more information, see this manual.
| Item | Value |
|---|---|
| Mass | 160 |
| Drag | 0 |
| Angular Drag | 0 |
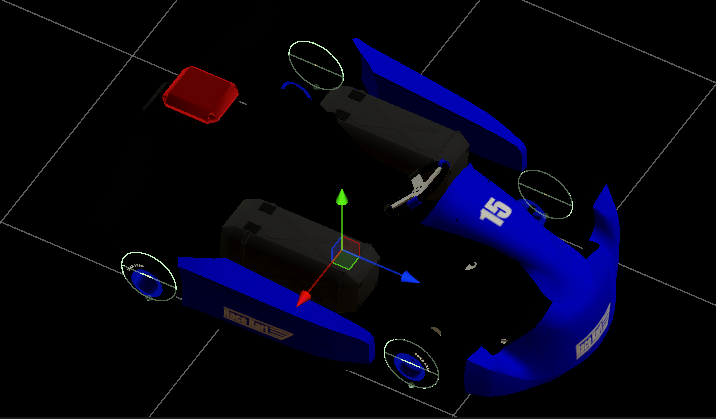
CoM Position
CoM (Center of Mass) is the mass center of the vehicle Rigidbody. The CoM position is set at the center of the vehicle and at the height of the wheel axles.
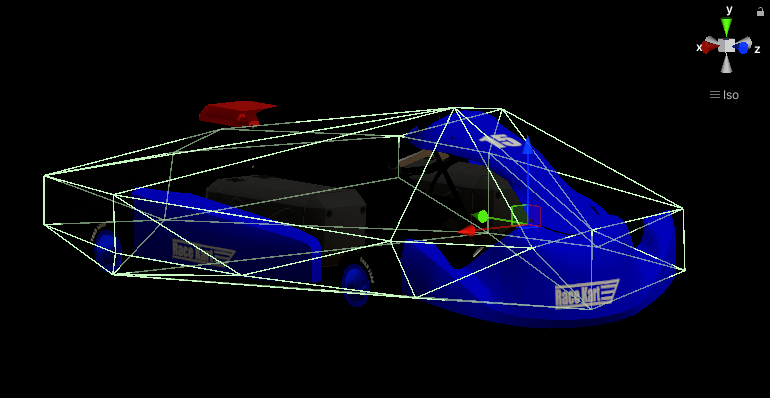
Vehicle Collider
Vehicle collider is used to detect collision between the vehicle and other objects or checkpoints. The vehicle collider is created based on the mesh of the vehicle object.
Wheel Colliders
The vehicle has a total of four wheel colliders - one for each wheel, simulating the vehicle on a four-wheel model, rather than a kinematic bicycle model.
The Wheel Collider is set as follows. For more details on wheel colliders, please refer to this manual.
| Item | Value |
|---|---|
| Mass | 1 |
| Radius | 0.12 |
| Wheel Damping Rate | 0.25 |
| Suspension Distance | 0.001 |
| Suspension Spring | |
| Spring (N/m) | 35000 |
| Damper (N*s/m) | 3500 |
| Target Position | 0.01 |
Sensor Configuration
GNSS
The GNSS is mounted at the following position relative to the vehicle base link.
| Item | Value |
|---|---|
| x | 0.0 m |
| y | 0.0 m |
| z | 0.0 m |
| roll | 0.0 rad |
| pitch | 0.0 rad |
| yaw | 0.0 rad |
IMU
The IMU is mounted at the following position relative to the vehicle base link.
| Item | Value |
|---|---|
| x | 0.0 m |
| y | 0.0 m |
| z | 0.0 m |
| roll | 0.0 rad |
| pitch | 0.0 rad |
| yaw | 0.0 rad |